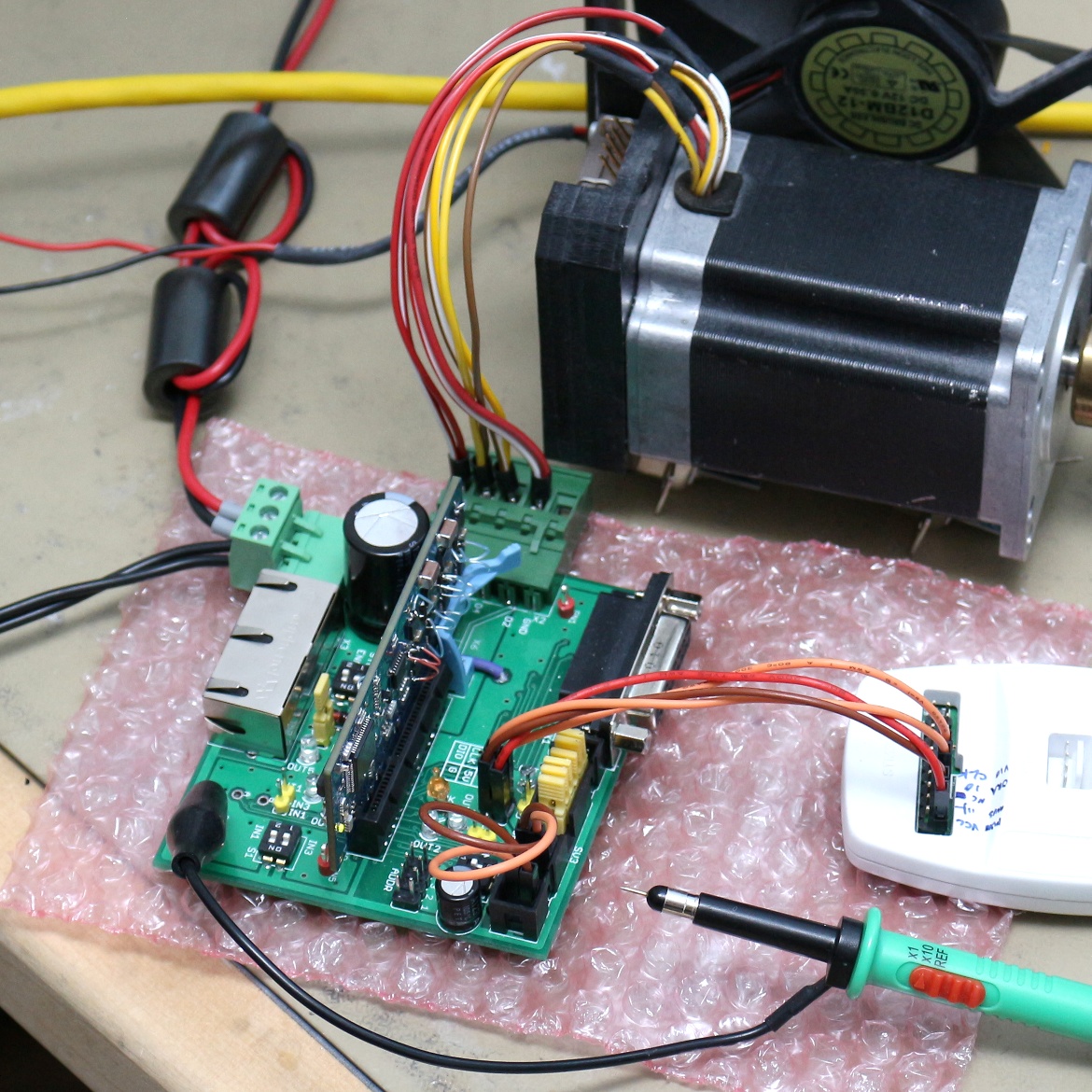
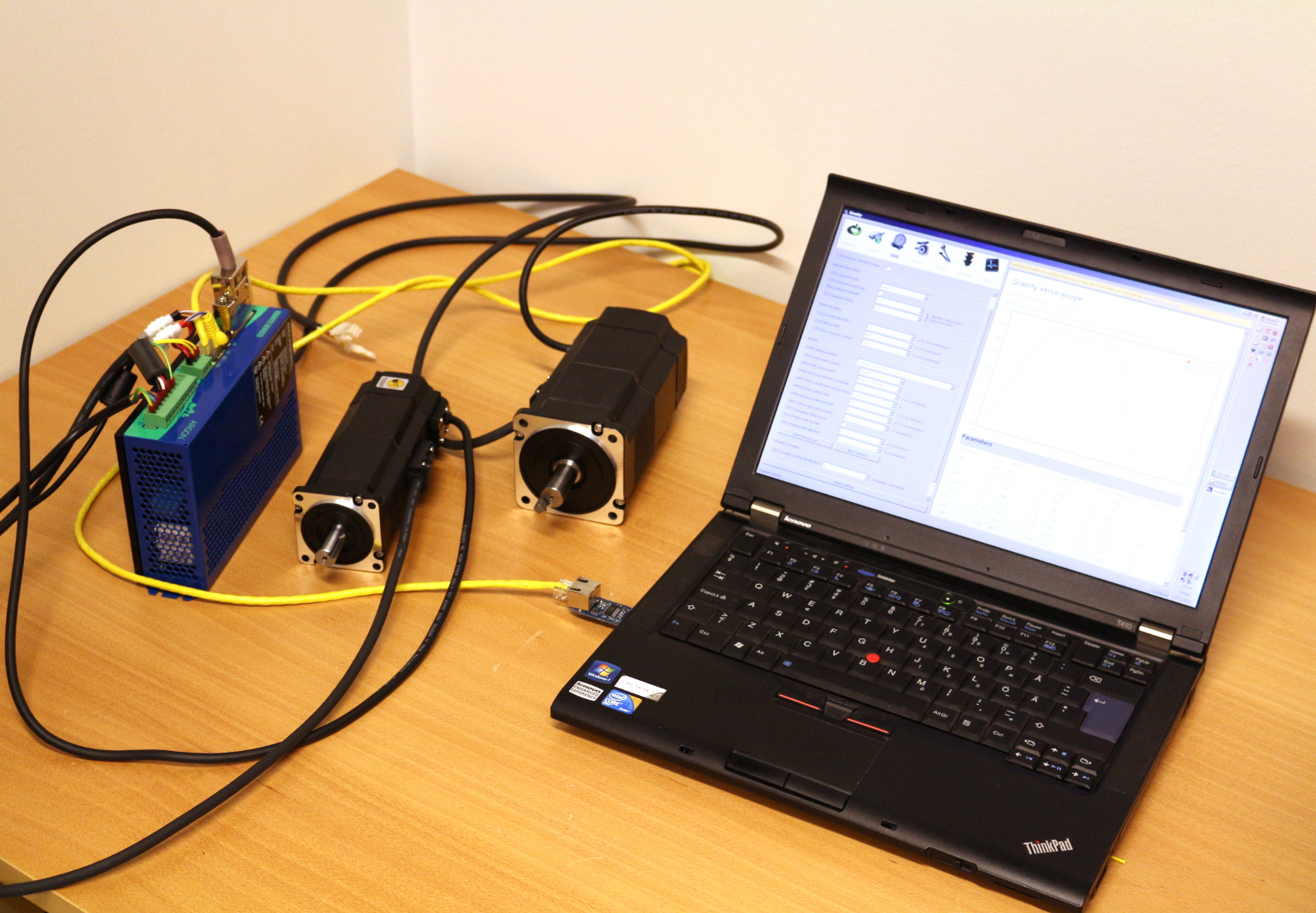
The testing protocol of IONI drives is derived from Argon test setup and consists several steps including:
- Chip programming and program verification
- Testing of digital inputs & outputs
- Testing accuracy of analog inputs (analog setpoint input as well as on-board sensor signals)
- Testing interconnectivity of internal circuity
- Testing all electrical functionality (such as safe torque off)
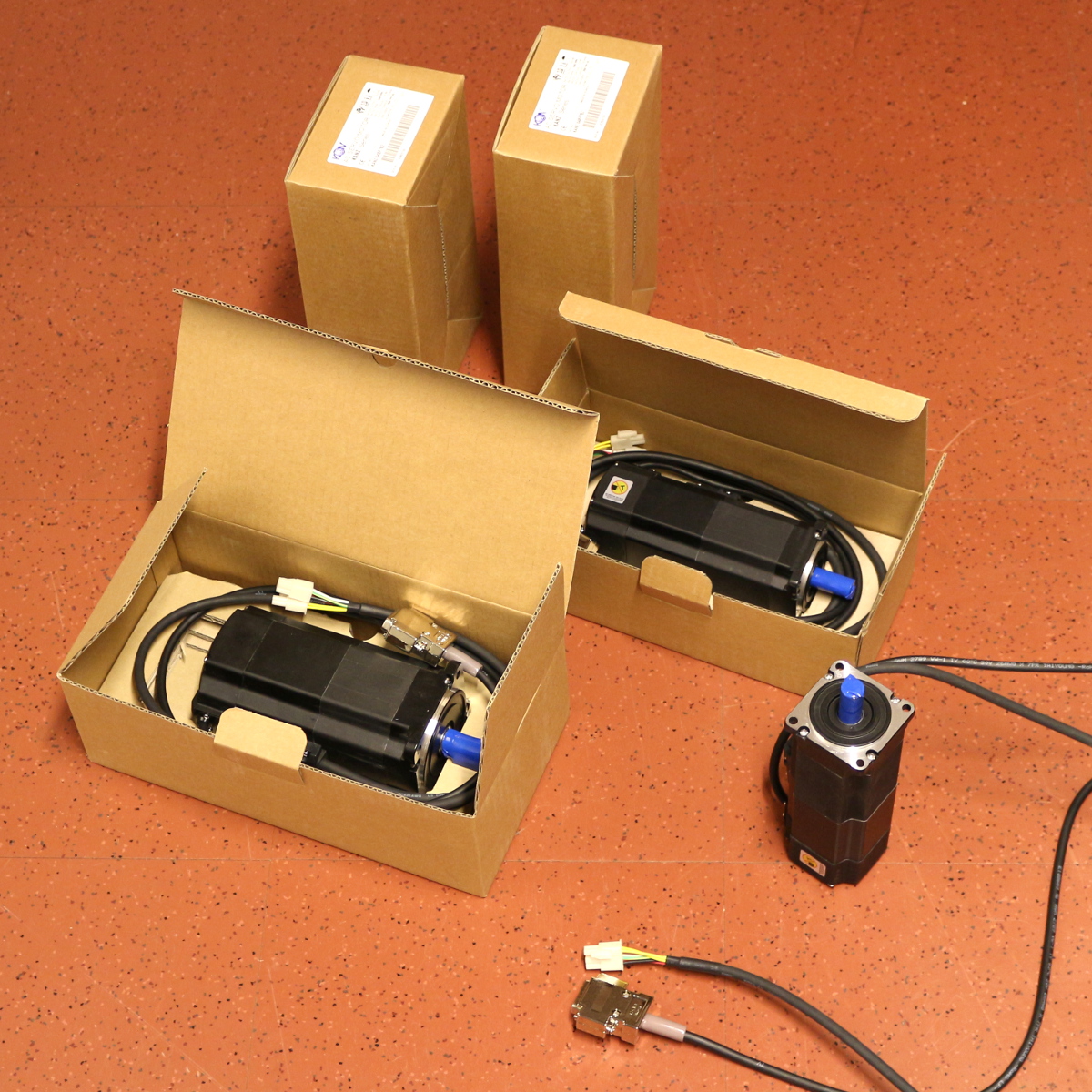
- Burn-in testing with maximum load. The load is a large stepping motor which utilizes all four power stage channels.
- From burn-in data, we measure time versus heating (efficiency) and torque control behavior
- All results, data and logs are stored in SQL database where we can look for anomalies if a device fails later
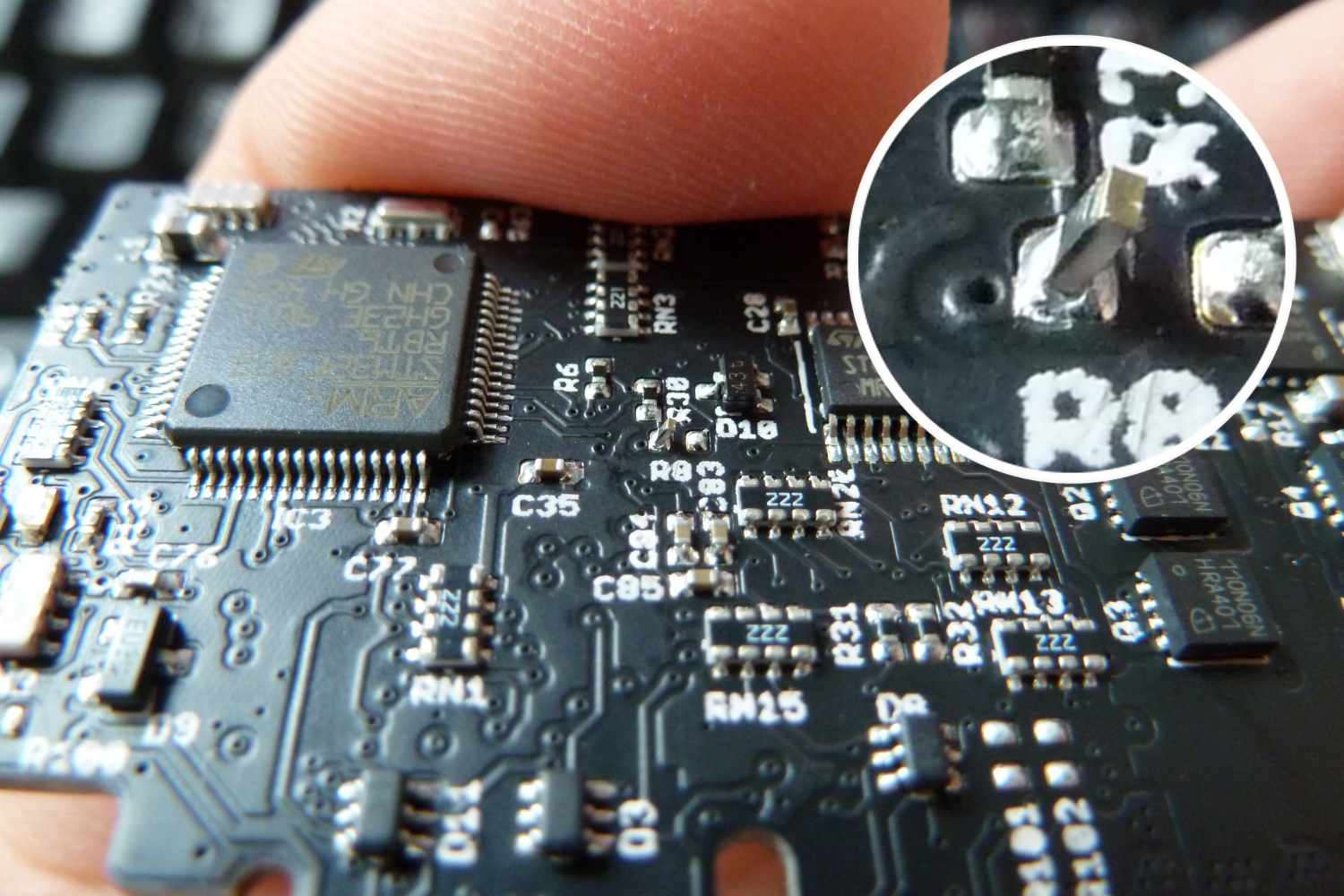
This is a reason why we test. IONI with one “tombstoned” 0604 size resistor, that would have been hard to spot without testing.