Many of the Early bird purchases have been shipped on Friday and rest will follow as soon as possible. The schedule of more IONICUBEs (4 axis type) are ahead of original schedule and we hope to have then all shipped within 2 weeks (also non-early birds)!
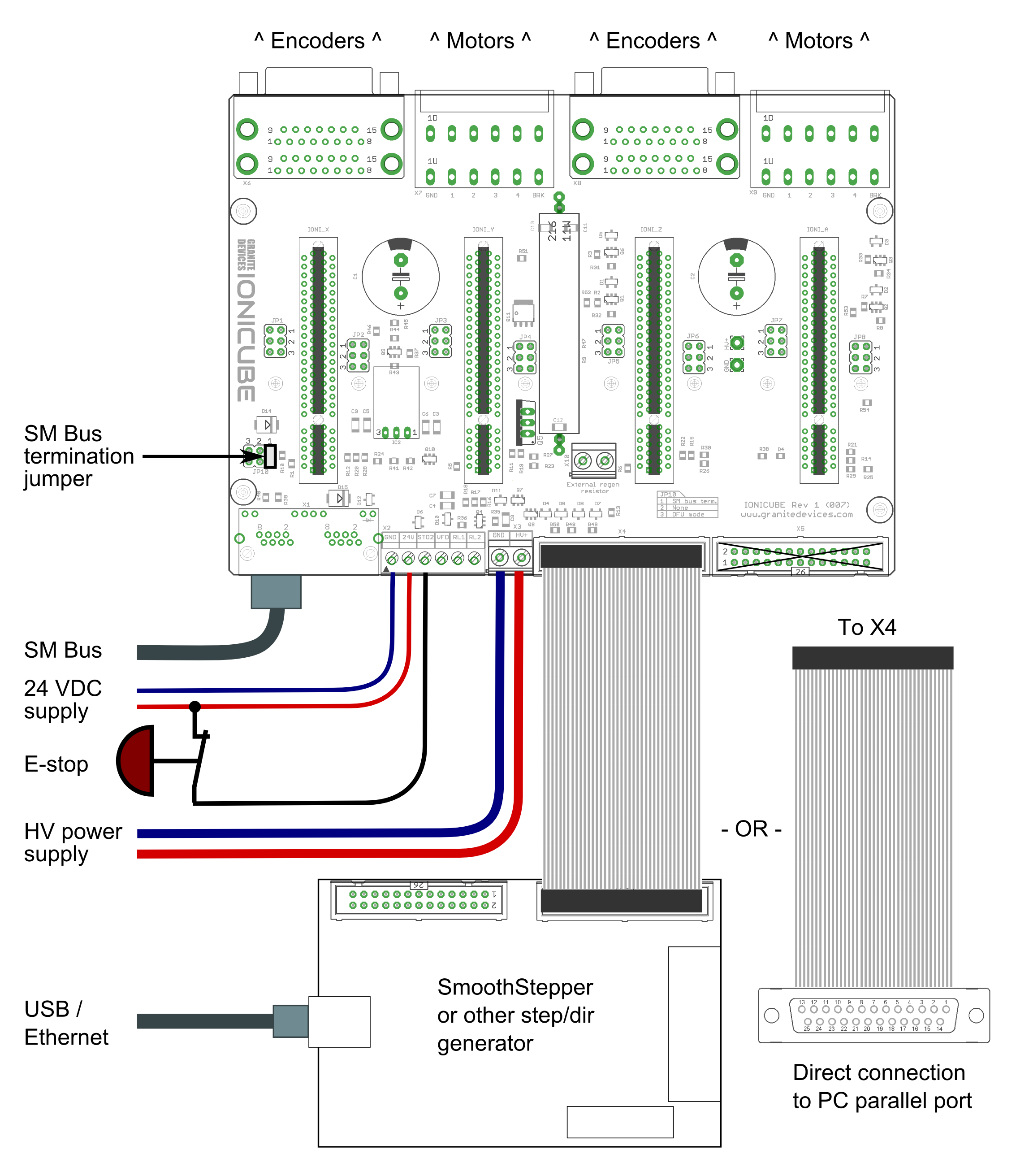
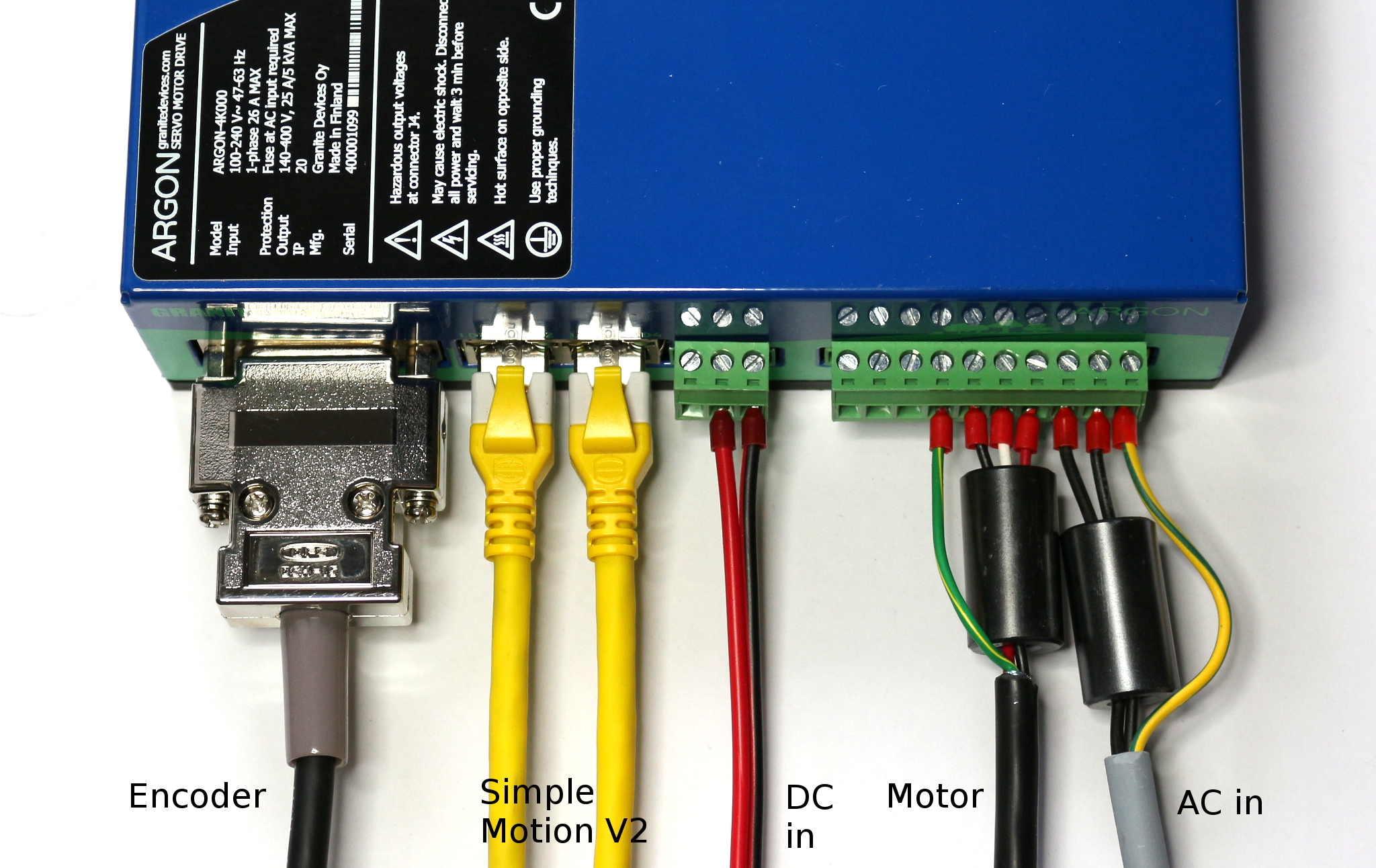
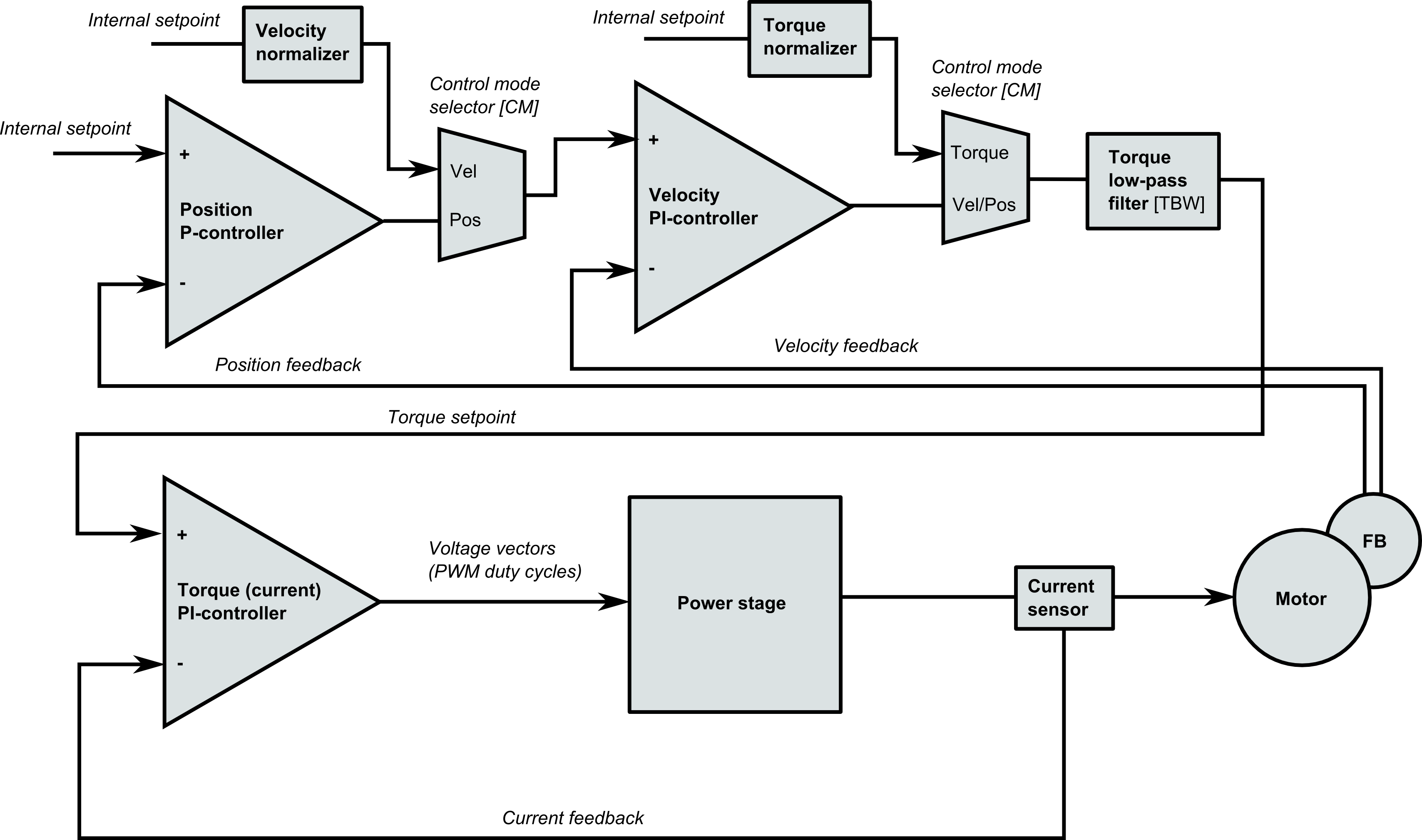
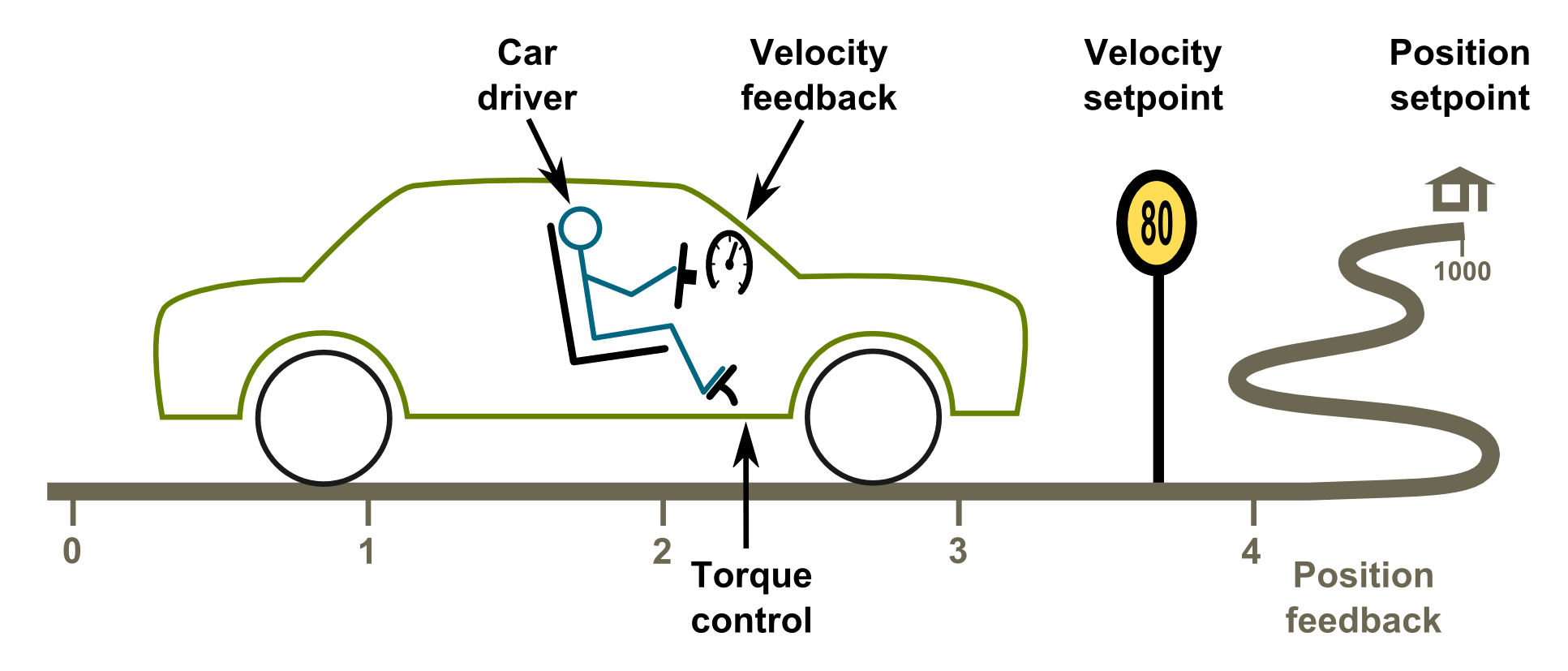
Meanwhile the user guide of IONI & IONICUBE has been completed and available at Wiki. Please check it and leave a comment about the questions it leaves unanswered.
Also feel free to add pages to the Wiki. Especially wanted pages are configuration examples in various systems (such as Mach, LinuxCNC & others). Articles doesn’t have to be polished from the start as Wiki improves it self by the help of contributors. It helps a lot if you share just your own experience of the setup. We also start to offer discounts for users making good efforts to make user guides. If interested, drop us a message :)