Prototypes of SimuCUBE motherboards and acrylic case have just arrived! The first successful test drive has been done with a big smile :) We hope to have Indiegogo campaign launched on the next week. Get ready for early bird specials!

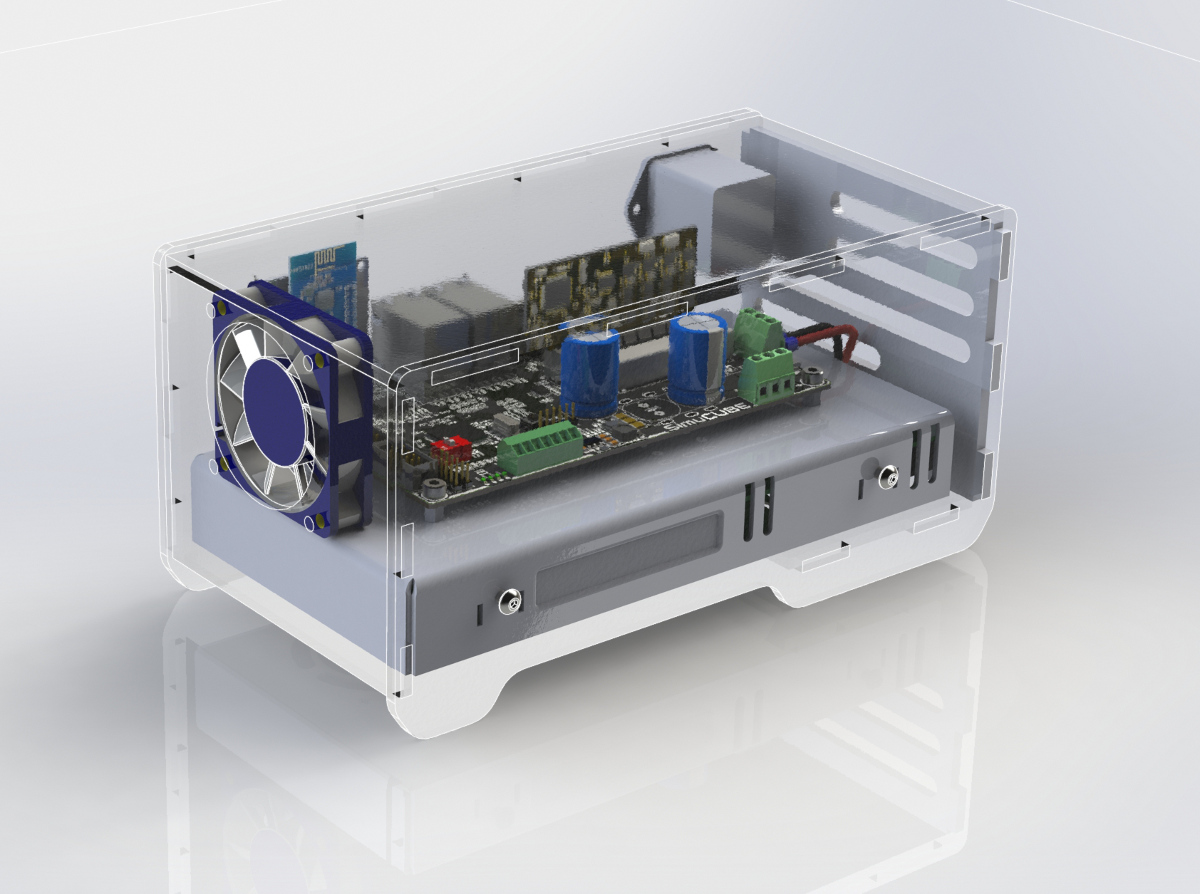
SimuCUBE front

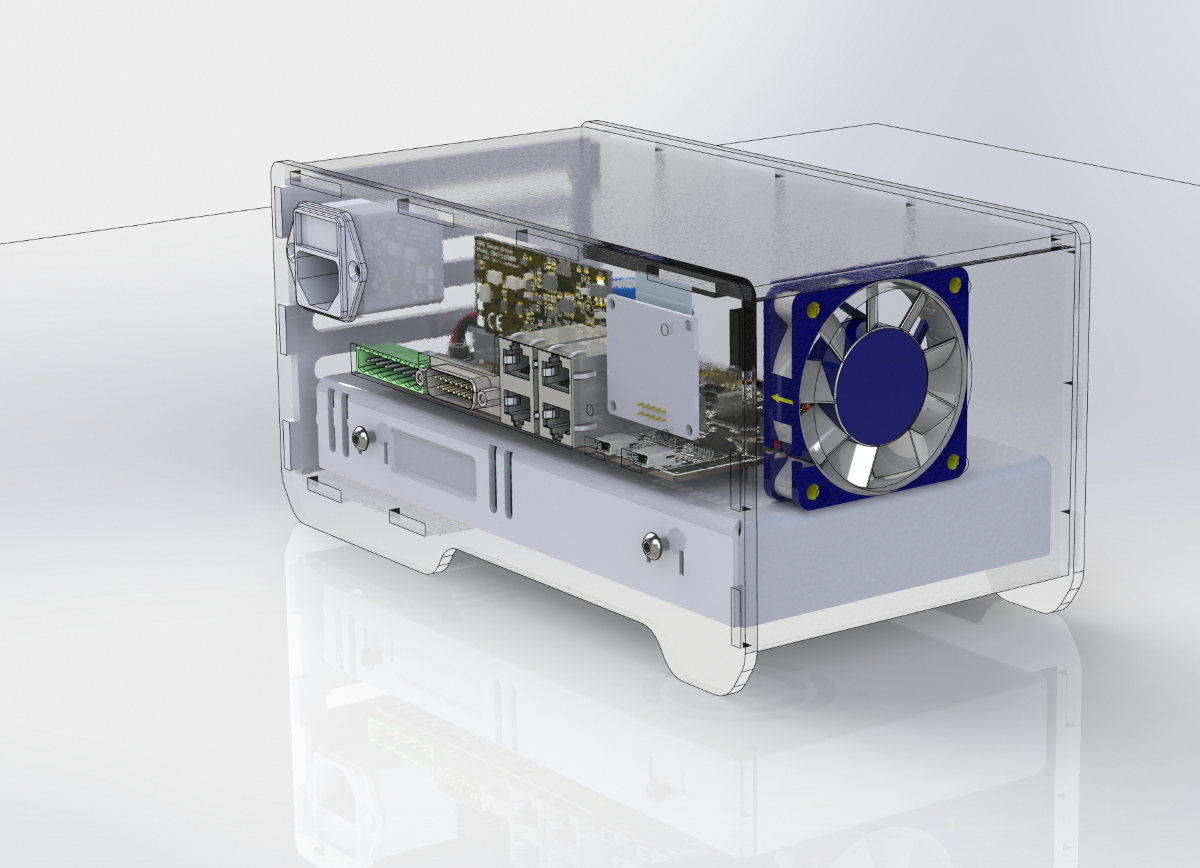
SimuCUBE rear

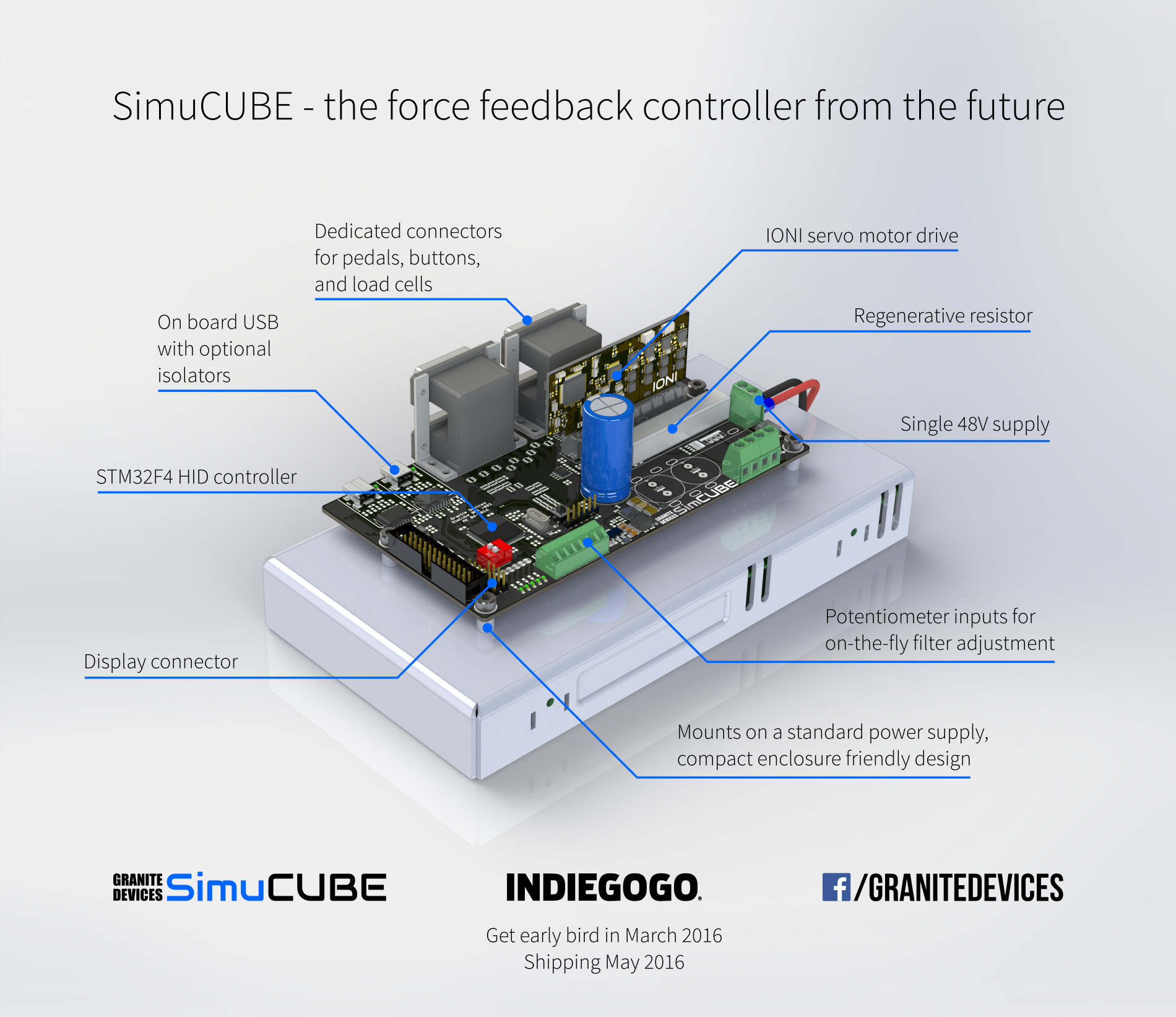
SimuCUBE motherboard with IONI Pro HC and 320 power supply
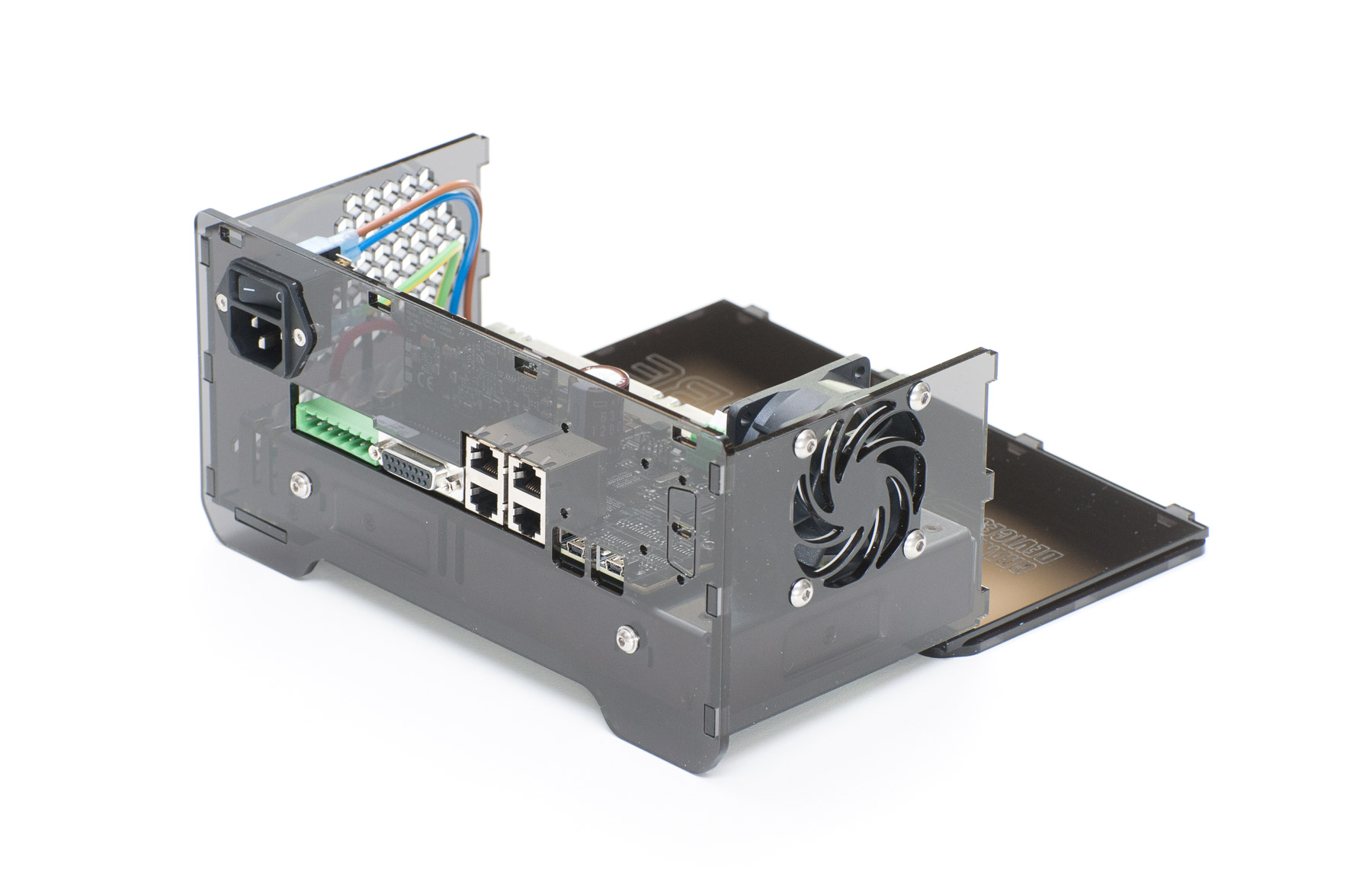
Construction of the acrylic case

Aside with 30 Nm peak MiGE motor
Ingenious SimuCUBE hardware & enclosure design and photos by Aki.