The decision to build a racing simulator with servo motor based force feedback has yielded first tangible results. The picture below shows the current setup of a force feedback wheel with a 36 Nm (peak) motor equipped with a sin/cos encoder. The system is being driven by IONI Pro HC and a STM32 Discovery based interface.

Simulator direct drive FFB wheel is operational but currently it lacks other controls. Mechanical parts design and tooling was implemented by Aki.
The first test drive on iRacing put a wide smile on our faces immediately and gave more motivation to make faster progress on it :)
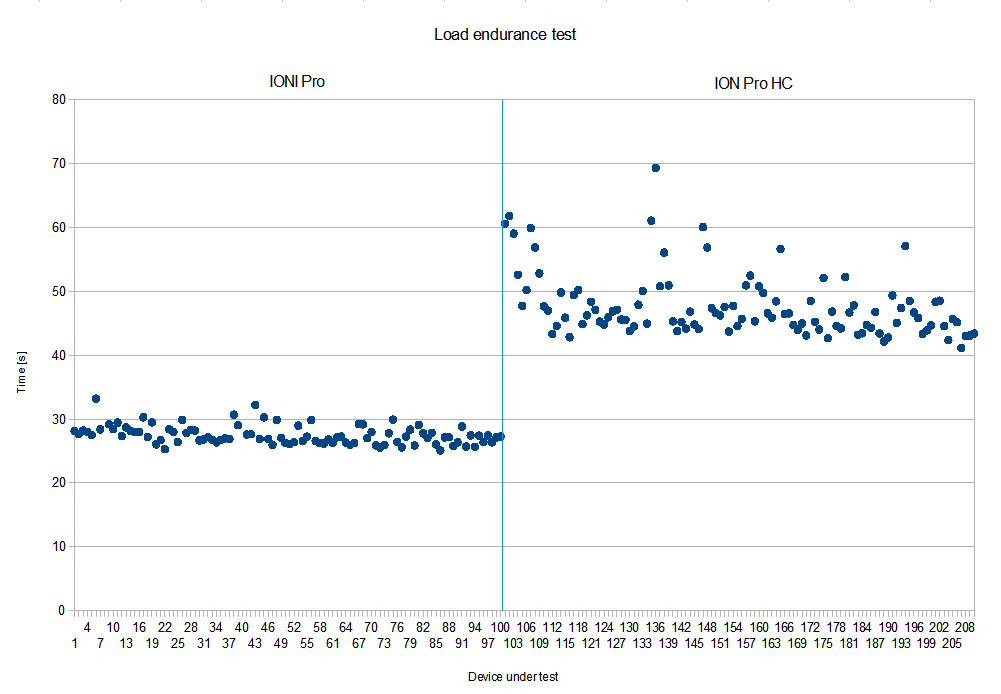
The plan is to experiment with wheel effect calculations, such as friction, inertia, damping and spring, inside the drive firmware to take full advantage of high resolution feedback devices. Also it’s a good platform to test how far IONI can be pushed in output current ratings in this kind of system.