As Fanuc servo motors are quite common target for drive retrofitting, it was tempting idea to make native support for their serial communication based encoder on Argon drive.
The protocol seems quite straightforward based on the details people have found out. So without much wasting time, I purchased a Fanuc motor and hooked it on the drive. Argon encoder port has total of three programmable RS422 inputs and two RS485 inputs/outputs which would make it possible to communicate with almost any kind of serial encoder.

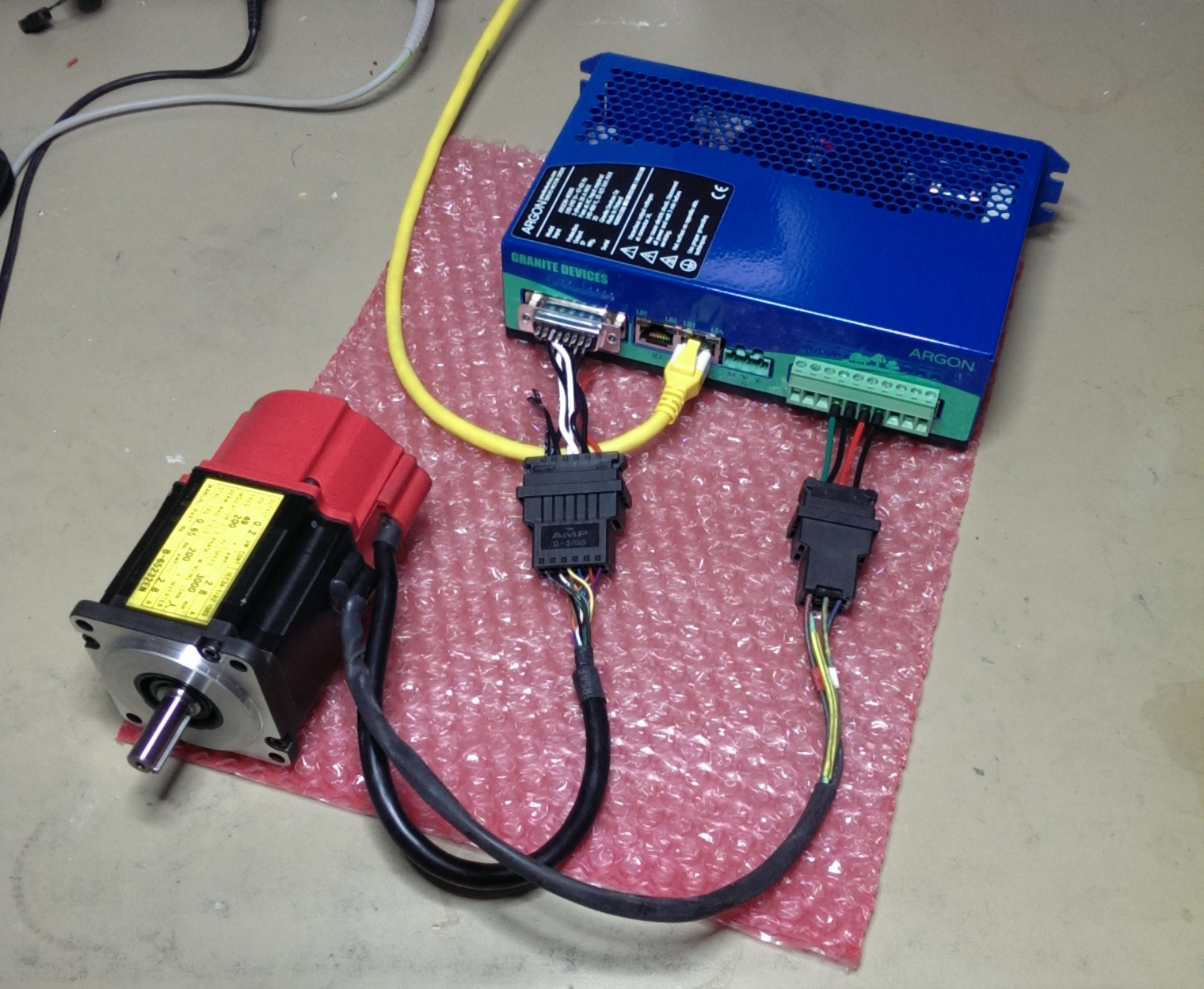
Fanuc “red cap” servo motor with serial pulse code connected to Argon drive
Fanuc encoder outputs data in form of asynchronous serial communication that is transmitted and received by UART. During testing, it occurred to me that encoder outputs very unusual 76 bit word with single start and stop bit. Standard UART support 5 to 8 bit words so the internal UART of drive’s microcontroller will not help here. Implementing a custom 76 bit 1024 kbps serial receiver with bare software would be so tricky that plan of supporting Fanuc protocol is unfortunately looking quite improbable at the moment.
The working solutions for using a Fanuc motor are:
Most of serial encoder protocols (SSI, BiSS, etc) use SPI style transmission which is way easier to implement on software. Plan of supporting those is in the future plans, we just need some hardware and time to begin with.