The 3-phase magic trick has been implemented in the firmwares of Argon and VSD-E drives. Argon firmware 1.4.0 contains also fixes for other recently discovered issues. Check them out from Wiki:
I hope you find them useful!

The 3-phase magic trick has been implemented in the firmwares of Argon and VSD-E drives. Argon firmware 1.4.0 contains also fixes for other recently discovered issues. Check them out from Wiki:
I hope you find them useful!
We have started development of Mach4 motion control plugin that supports SimpleMotion V2 bus. This means that ARGON and IONI drives can be controlled by Mach4 without any extra hardware. It just needs the SMV2 USB adapter and drives. The plan is also to allow control of few I/O signals through that plugin.
The plugin will be fully open source and available on GitHub if Artsoft sample plugin code license allows that (will be determined later).
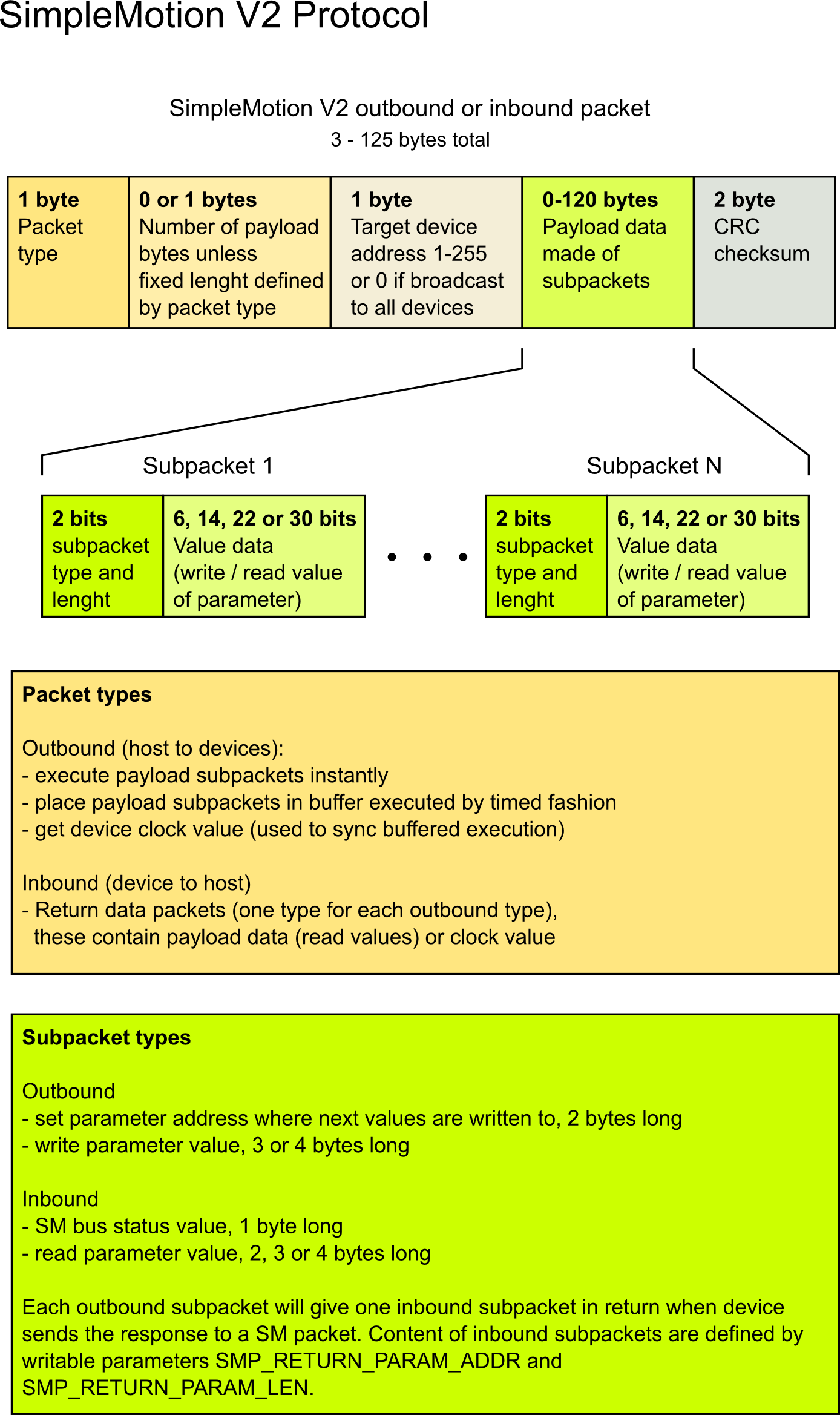
SimpleMoiton V2 protocol looks like this on a low level
Granite Devices will be on Christmas holiday for the next week. I wish merry Christmas to everyone following this blog! :)
Latest innovation made to IONI firmware allows generating 15% higher output voltage for 3 phase AC motors which in practice means 15% greater maximum possible speed of motor. This is achieved by by altering the duty cycle generation of power stage so that it’s being utilized better for this kind of waveforms.
By looking the typical 3-phase motor voltage waveforms below, one can notice the peaks of sine waves occur one-at-a-time which means there is some headroom in the opposing polarity waves.
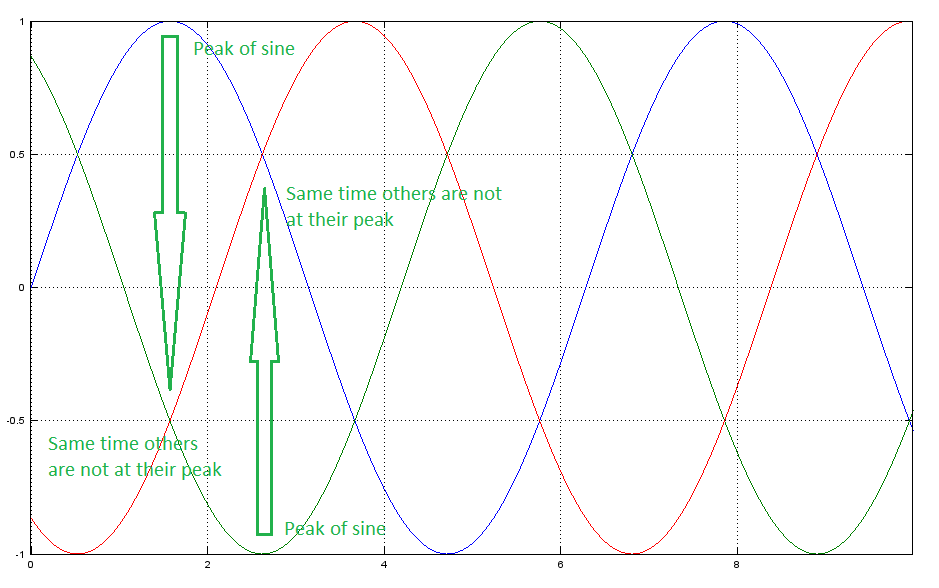
Standard 3 phase sinusoidal waveforms. Range from 1 to -1 means it uses full output voltage span available in drive (i.e. 0V to 55V)
We can utilize these empty gaps by shifting all three waves up and down so that empty gaps become filled.
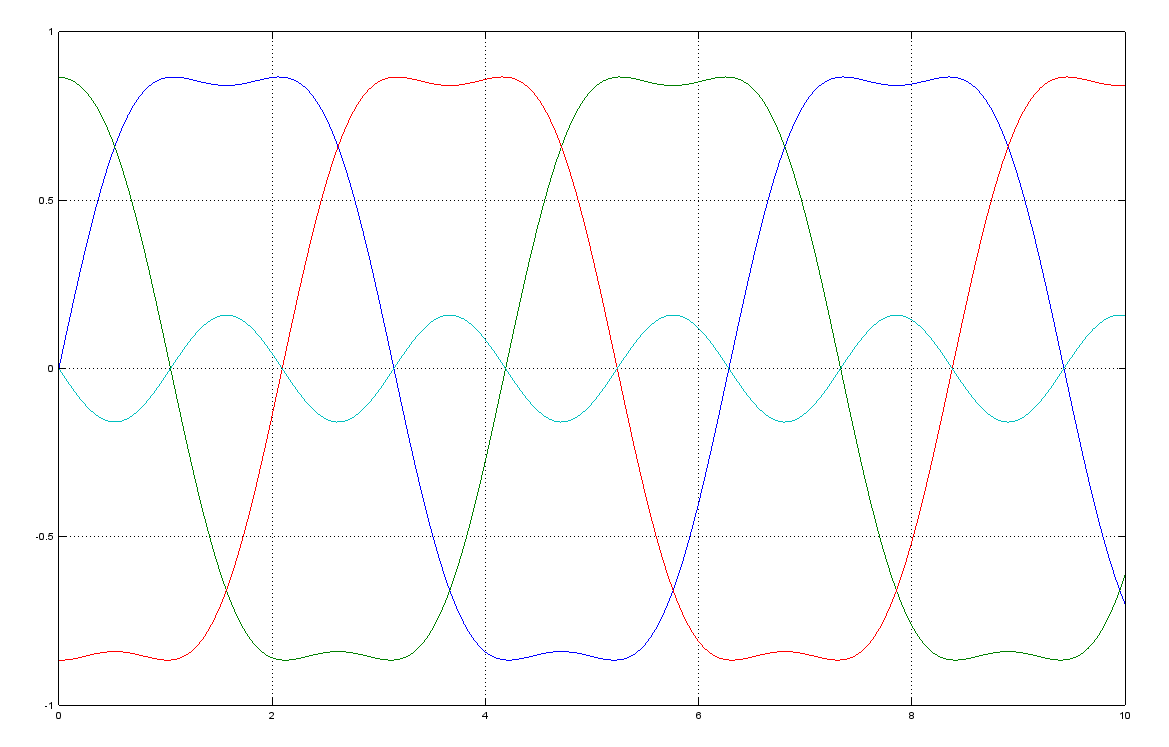
Same signals with summed third harmonic (cyan) to all phase values. This reduces peak amplitude of all signals by 15% without affecting to any phase-to-phase waveform shape or amplitude. In other words, motor sees no difference between this and the original.
After this step, we can multiply them by 1.15 without exceeding the maximum range of +/-1. This method has been tested and it works flawlessly. Same smoothness but just a bit higher speed range is available from the drive. The trick effectively does same as increasing drive supply voltage from 55 V to 64 V without actually increasing it.
This, and as many as possible, new features of IONI will be ported back to ARGON as soon as the IONI is out.
For those who are interested to see how servo drive internals are constructed, see the new Wiki article: Signal path of servo motor drive. The diagrams presented in the article are useful when designing systems where servo drives are part of the system.

Signal path from setpoint source (user interface) to internal setpoint (fed to actual servo control)
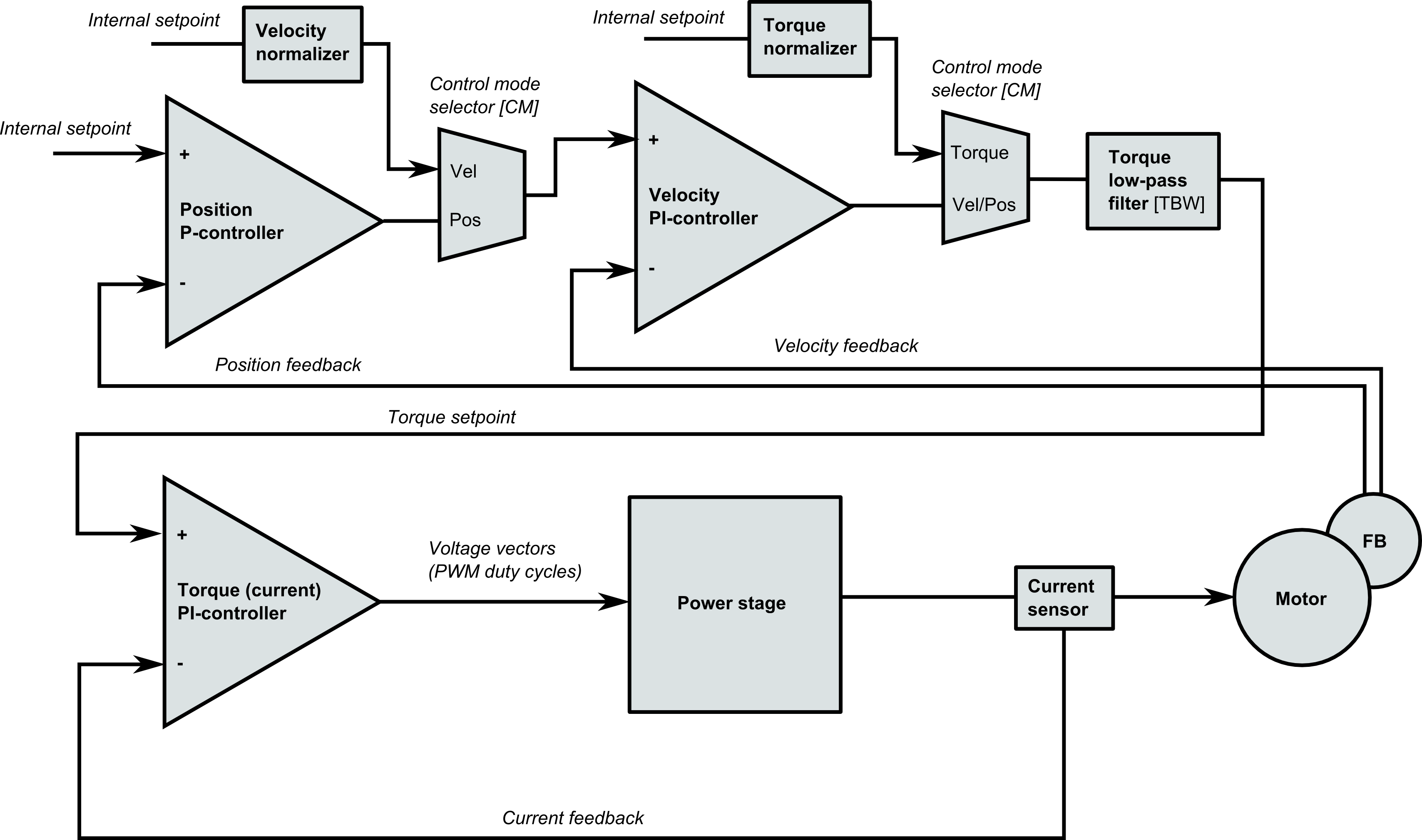
Drive block diagram that applies to all GD drives starting from VSD-E
The diagrams are also useful when designing custom code to Argon open source I/O side firmware. The I/O side microcontroller acts as provider of User setpoint as well as position and velocity feedbacks referred in the images. Rest of the illustrated logic lies inside the GraniteCore.
The gaps in the Wiki documentation for Argon are being filled every day and soon it shall be ready enough to allow actual use of the drives. The latest addition is a car analogy for servo tuning – find it here!
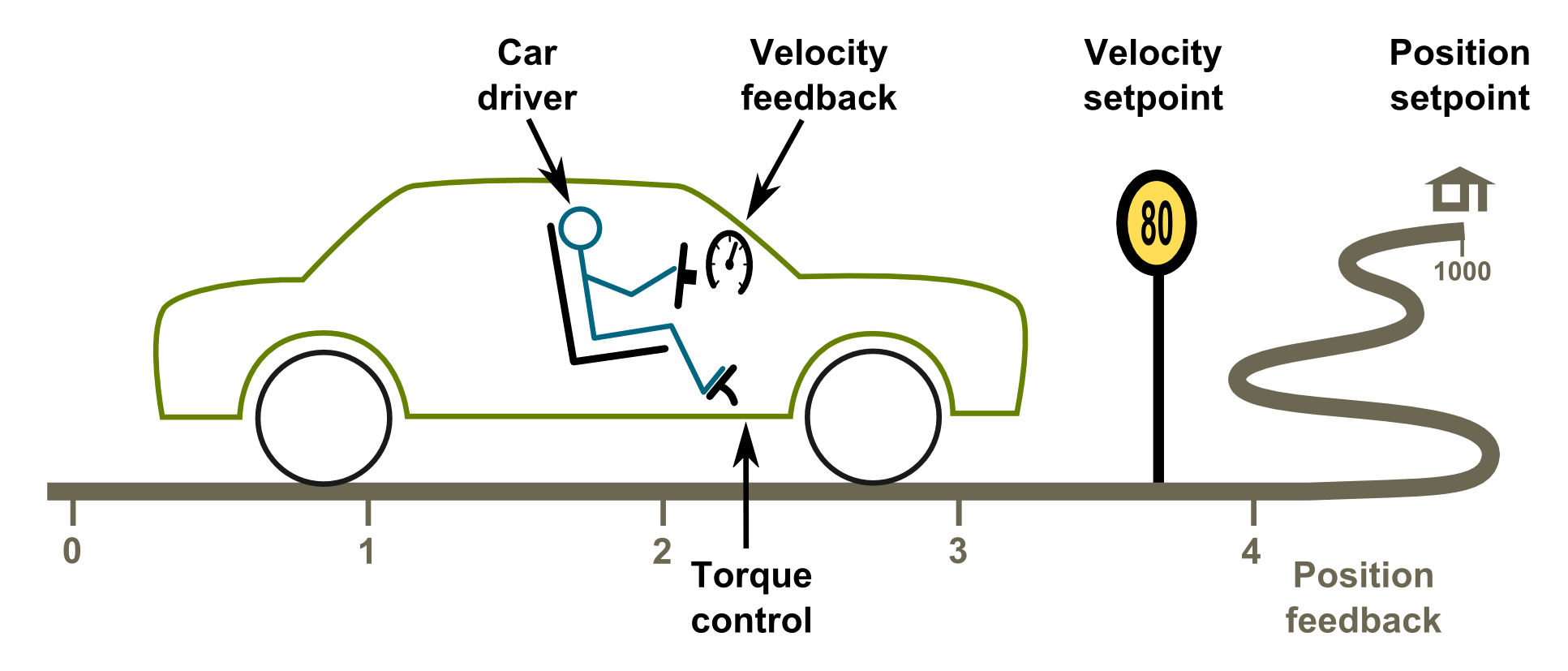
Car analogy for servo control and tuning